脚の繰り出しはチェビシェフの第1近似直線運動機構で実現しています。 モータが内蔵されているのと自重を支えるためのブロックの補強とで足首が大きく重くなってしまいました。 足首部の小型軽量化が今後の課題です。 足首を動かすタイミングは脚の付け根のクランク部に取り付けたタッチセンサで取得しています。
本体を傾けるため踏み込み足は地上高50mmくらい上がりますが、反面着地時のショックと上体の上下動が大きいです。 このへんはムービーをご覧頂けるとよく判ると思います。
2足歩行ロボット Biped 1 |
|
|
|
|
|
|
|
|
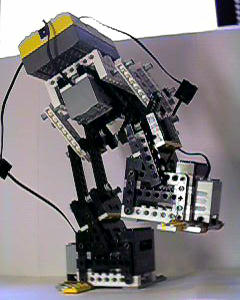
2足歩行ロボット「 Biped 1(バイペッドワン)」です。
足先にモータを内蔵しウォームギアで足首を動かすことによって左右に体重移動しながら脚を繰り出して歩行します。
人の歩行メカニズムのなかで、足裏の外エッジの部分で着地し内エッジで蹴り出している点に着目して製作してみました。
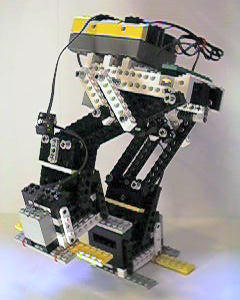
床面に近い足首を傾けることによって少しの傾斜角で本体を大きく体重移動させることができます。ただし、転倒しやすくなるので
調整がシビアになります。 脚の繰り出しはチェビシェフの第1近似直線運動機構で実現しています。 モータが内蔵されているのと自重を支えるためのブロックの補強とで足首が大きく重くなってしまいました。 足首部の小型軽量化が今後の課題です。 足首を動かすタイミングは脚の付け根のクランク部に取り付けたタッチセンサで取得しています。 本体を傾けるため踏み込み足は地上高50mmくらい上がりますが、反面着地時のショックと上体の上下動が大きいです。 このへんはムービーをご覧頂けるとよく判ると思います。 |
|
|
歩いているところを是非見て頂きたかったのでムービーを作ってみました。RealPlayer G2フォーマットで公開します。
RealPlayer G2用動画ファイル(前方から)のダウンロード(biped01.ram 20秒 56KB) RealPlayer G2用動画ファイル(後方から)のダウンロード(biped02.ram 20秒 62KB) RealPlayer G2(フリーウェア)のダウンロードはこちらから。 |
|

|
おかげさまで、Biped1は LEGOオフィシャルサイトにて開催されたHALL OF FAMEコンテスト 1999年8月のエキスパート部門最優秀ロボットに選ばれました。投票して頂いた皆さんありがとうございました。これを記念してBiped1のLEditデータとNQCのソースプログラムを公開します。 |
| ファイル名 | 説明 | サイズ |
| biped1.zip |
LEdit用のCADデータ。 biped1.datをLEditまたはML CADで開いてください。 LEditおよびML CADに関する情報は http://www.ldraw.org/ (英語)から得ることができます。 |
4KB |
| p1_1x.nqc(NQC1.x) p1_2x.nqc(NQC2.x) |
メインプログラム。 NQCを使ってProgram1に転送してください。 スタート時には右足のセンサONを待ちますので右足で接地するようにしてください。 Sleep(NQC1.x)またはWait(NQC2.x)の値は各自で調整して決定してください。 |
1KB |
| p2_1x.nqc(NQC1.x) p2_2x.nqc(NQC2.x) |
両足首を右に倒すプログラム。 NQCを使ってProgram2に転送してください。 スタート時には右足で立ちますので、 足首は両足とも右に倒しておいてください。 |
1KB |
| p3_1x.nqc(NQC1.x) p3_2x.nqc(NQC2.x) |
両足首を左に倒すプログラム。 NQCを使ってProgram3に転送してください。 |
1KB |