Biped 1 |
|
|
|
|
|
|
|
|
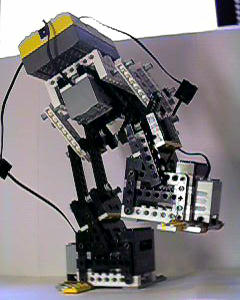
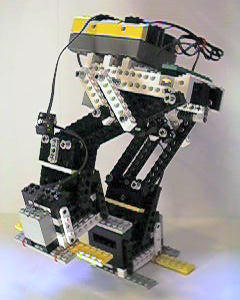
This is the biped robot "Biped 1".
This robot has an ankle motor each leg,and can walk by switching own center of balance.
|
|
|
Download RealPlayer G2 movie here!!(biped01.ram 20(s) 58KB) Download RealPlayer G2 movie here!!(biped02.ram 20(s) 62KB) Download RealPlayer G2 here.(Freeware) |
|

|
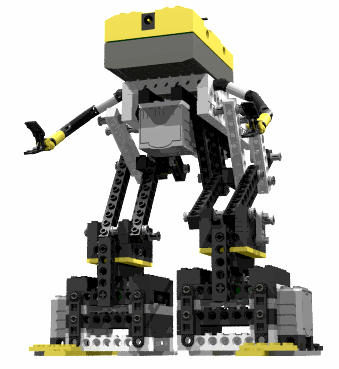
Biped1 is winner of HALL OF FAME the 1999 August contest on LEGO MindStorms official site. Thank you very much voting for my robot. You can download LEdit CAD data file of my robot and programs for NQC. |
| FILE NAME | DISCRIPTION | SIZE |
| biped1.zip |
LEdit CAD Data Please open biped1.dat on LEdit or ML CAD. You can get these informations from this site (http://www.ldraw.org/) |
4KB |
|
p1_1x.nqc(NQC1.x) p1_2x.nqc(NQC2.x) |
main program for NQC. Please transmit to RCX Program1. First the robot must stand only right leg. Please adjust Sleep( ) or Wait( ) value for your situation. |
1KB |
|
p2_1x.nqc(NQC1.x) p2_2x.nqc(NQC2.x) |
Turn ankles right direction. Please transmit to RCX Program2. First the robot must stand only right leg. So you must have ready the ankles right direstion. |
1KB |
|
p3_1x.nqc(NQC1.x) p3_2x.nqc(NQC2.x) |
Turn ankles left direction. Please transmit to RCX Program3. |
1KB |