|
|
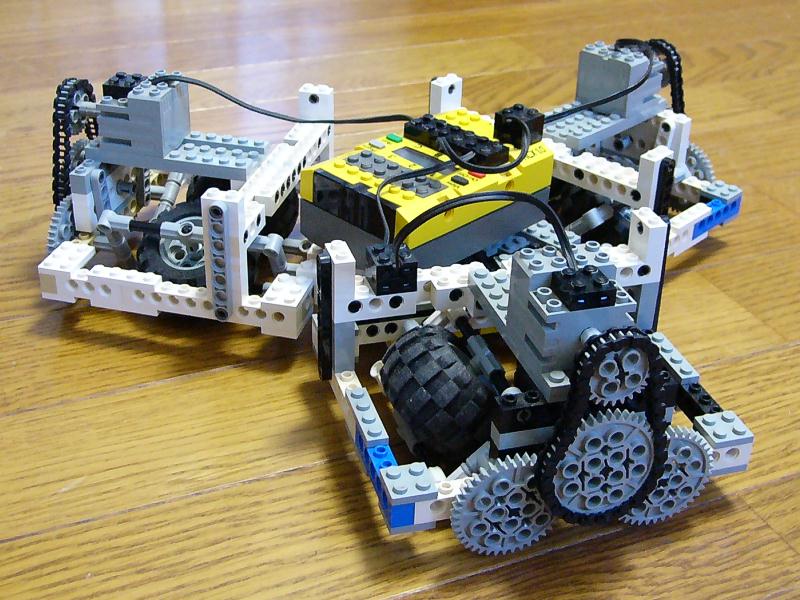
新製品のNXTが発売されると聞き、久しぶりにLEGO MindStormsで遊びたくなって作ったものです。これは私のオリジナル作品ではなくて、Markus Maternさんのサイトで紹介されているインストラクション通りに組み立てたものです。ステアリング機構を持たない移動機構としては戦車などで用いられる無限軌道(キャタピラー)のような差動式が一般的ですが、真横に移動する場合にはその場で旋回してから前進(または後退)する必要があります。例えばサッカーのゴールキーパーロボットを製作すると仮定すると、差動方式のプラットフォームでは真横に動くためには一旦敵に側面を見せて移動しまた正面を向きなおす必要があり不利です。このプラットフォームでは上体がどちらを向いていようと3つのモータを制御することでゴールキーパーが正面を向いたまま守備位置を移動するように全方位に移動することができます。用意した動画を見ていただけると動きが理解して頂けると思います。思いのほか機敏に動きます。機構的にはとても興味深い動きができる方式なのですが、タイヤにバイアス方向とラジアル方向の負荷がかかるので実用化にはタイヤと駆動系の高い耐久性が必要になると想像されます。
Markus Maternさんのサイトにはインストラクションに加えてNQCのサンプルコードも公開されていますので、パーツさえ揃えば簡単にこのプラットフォームを作ることができます。非常におもしろい動きをしますので一度作ってみてはいかがでしょうか?
|
|