パラレルメカニズムとは,ベースプレートとエンドエフェクタが、並列(パラレル)に並んだ複数のリンク機構によって接続された閉リンク機構のことをいい、現在のロボットなどに多く利用されている開リンク機構とは異なった性質を持っています。 特徴としては、
- 剛性が高い:エンドエフェクタへの力が分散されるため外力による変形が開リンク機構に比較して小さい。
- 低出力でOK:アクチュエータの力が合成されるので出力の小さいアクチュエータが使用可能。
- 可動範囲が非常に狭い。
- ちゃんと位置制御するためには制御計算が複雑で処理に時間がかかる。
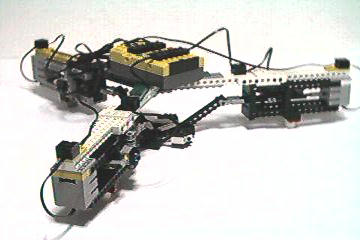
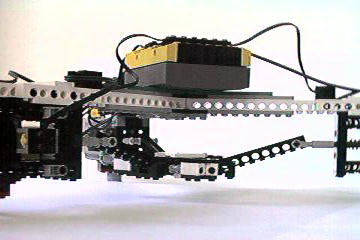
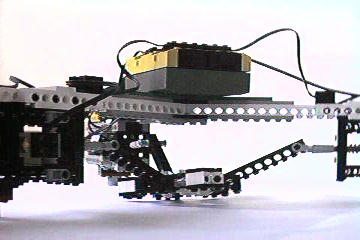
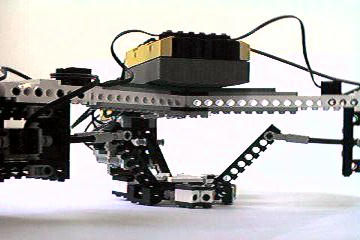
Parallel Wakerは3つのモータが120度の開き角度で配置され,直動方向の動きに変換されます。 この3つの直動軸がエンドエフェクタに結合され閉リンクを形成しています。 直動機構の製作にはleoさんのページが大変参考になりました。