Qualk (QUadruped wALKer) |
|
|
|
|
|
|
|
|
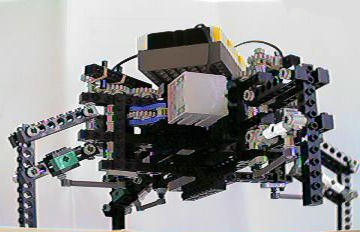
This is the quadruped walker "Qualk" (not quark).
First, I planed the 4 legs walker with 4 independent motors controlled by 2 RCXs.
I made a prototype to confirm them,but the prototype robot didn't resist 2 RCXs weight.
So I changed my 4 legs independent control plan.
I removed all sensors and drived 4 motors freely.
The rotaion speed of each motor has subtle difference,
so the robot do various unexpected interesting action.
|
|
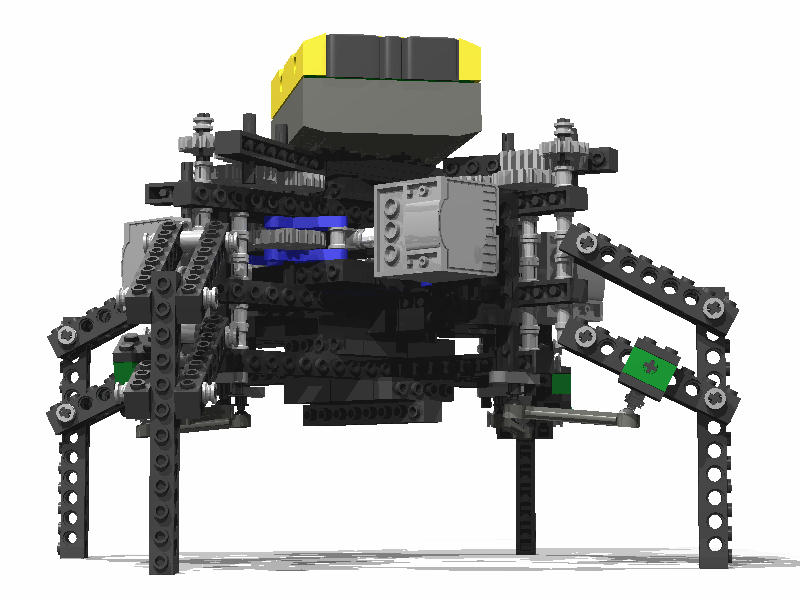
Qualk can walk Forward,Backword,Traverse,and Turn. But now uncontrollable. :-) |

|
|
(RealPlayer G2 Format) Walk Forward(with sensor controlled)qualk01.ram 20sec 113KB Turn Left(sensorless)qualk02.ram 34sec 194KB Download RealPlayer G2 here.(Freeware) |
|
|
|
|