|
|
|
| エッジくん1号 | |
|
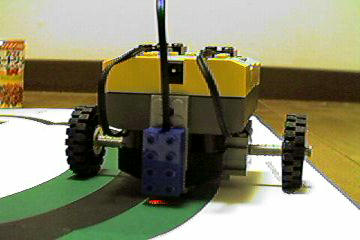
はたして、オリジナルといえるのかどうか疑問ですが、
MindStorms情報局
で行われているお気軽コンテストタイムトライアルVer.1.0に向けて作ったロボット「エッジくん1号」です。
メカはまんまパスファインダそのままでおもしろみに欠けるのですが、いろいろ試作してみて
タイムを出すことを最優先に考えた結果、ダイレクトドライブのデザインを採用しました。
シンプルイズベスト。制御で勝負! |
|
|
|
|
|
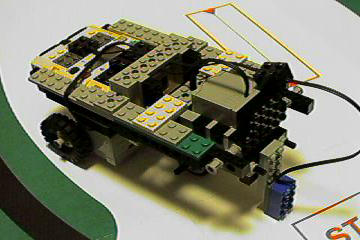
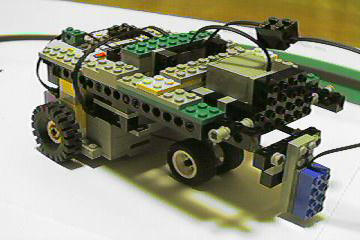
| エッジくん2号 | |
|
MindStorms情報局
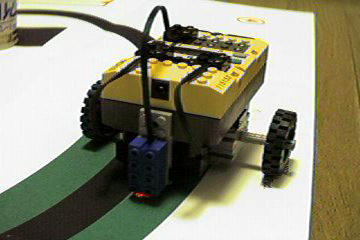
で行われているお気軽コンテストタイムトライアルVer.1.0のルール改訂に伴って10周走行しなくてはいけなく
なってしまい、慌てて軸受けを追加した「エッジくん2号」です。後にルールが右回り5周、左回り5周に再度変更された
ので、別に1号でもよかったのですが、せっかく作ったし耐久性も段違いなので2号でエントリーしました。
結果が楽しみです。スピードは結構速いと思っているのですが、欠点はかっこ悪いことです。(^^:)
ソフトも1号から若干チューニングしました。NQC&RcxCC使用。Daveさん、Markさんに感謝。
右回り(中心を右に見て回る) 51秒44 左回り(中心を左に見て回る) 45秒30 合計96秒74 |
|

|
|
|
|
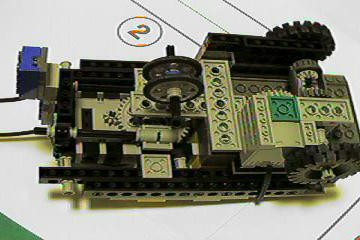
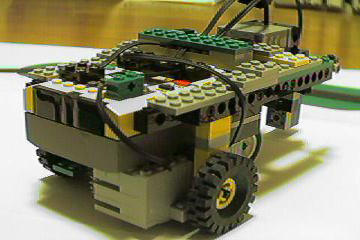
| エッジくん3号 | |
|
|
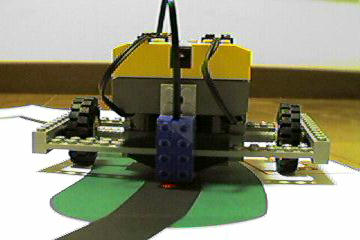
8480にターンテーブルが入っていて、入手していらいこのパーツを使ってみたかったのですが、 今回コンテスト参加ロボット「エッジくん3号」に使ってみました。 2輪駆動力差制御タイプ「エッジくん2号」で思うようにタイムが伸びなかったので、 3輪のステアリング方式に挑戦してみました。 ターンテーブルにモータを組み合わせてステアリング機構を実現しています。 ステアリングモータまわりの固めかたに苦労しました。 |

|
駆動部は1モータでデファレンシャルギアを
組み合わせています。クラス2では右回りと左回りの両方できなくてはいけないのですが、
「エッジくん3号」は左回りの時は楕円の内側を右回りの時は楕円の外側を回るので、
内輪差の関係から左回りの方が旗門通過に関して厳しい状況にあり、そのため車両中心に対して
駆動輪が右にオフセットして配置されています。
あいかわらず場あたり的に作っているためデザインセンスゼロですが、タイム的には「エッジくん2号」から格段に速くなりました。 右回り(中心を右に見て回る) 14秒29 左回り(中心を左に見て回る) 14秒34 合計29秒03 |
|
|
|
| エッジくん4号 | |
|
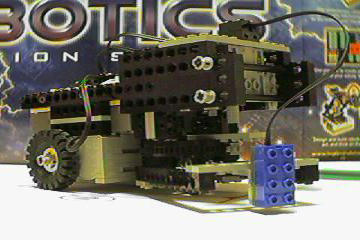
クラス1で1位のオクダさんに誉めてもらったので、調子に乗ってエッジくん3号をリファインして「エッジくん4号」を
作りました。今回のコンセプトは「RISの部品だけでつくる」です。エッジくん3号の時はターンテーブルを使ってみたかったので
勢いで作ってみたのですが、コンテストとなるとやはりちょっと気がひけておりました。そこで、RISの部品だけでできないだろううかと
考えてなんとかできそうなメドがついたので製作してみました。今回はデザインにもちょっとは気をつけて製作していますので、
ステアリング回りの処理もすっきりしました。センサーと前輪との距離を無段階で調節できるのも特徴です。(これは結構重要かも)
タイムを測定してみたところエッジくん3号を上回るタイムを出しましたので、まずは成功といったところでしょうか。 右回り(中心を右に見て回る) 14秒40 左回り(中心を左に見て回る) 13秒81 合計28秒21 |
|

|
|
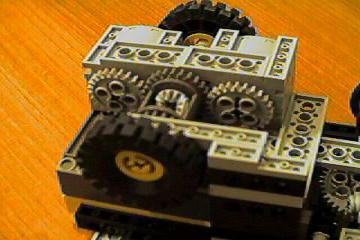
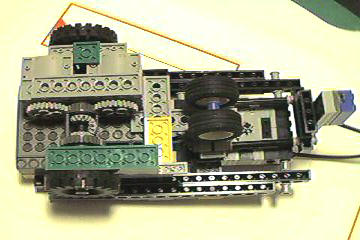
大公開、裏側から見たところです。
駆動部は前回と同じく1モータでデファレンシャルギアを組み合わせています。
ステアリング部は40枚歯ギアと8枚歯ギアの噛み合わせで構成されています。
|
|
|
|
|
| エッジくん4号改 | |
|
|
|
高塚さんの記録に挑戦すべく、legOS使いの友人衛藤くんの力を借りてソフトをlegOSベースに変更。
電池もパナソニックの金パナの新品を使用し、加えてモータもひとつ借りてドライブ2モータ、ステア1モータの
3モータ構成にしてみました。legOSの使用により操舵が小刻みになりドライブをハイパワーにしてもコースアウト
しなくなりました。きれいに円をトレースします。渾身の1作です。
右回り(中心を右に見て回る) 11秒99 左回り(中心を左に見て回る) 11秒70 合計23秒69 |
|
|
|
| エッジくん6号 | |
|
全クラス中最速の座奪還を目指して製作した「エッジくん6号」です。今回の目玉はオーバードライブ機構です。「エッジくん4号」まではギア比1:1で、タイム的にはもう限界にきていたことは判っていました。駆動用モータを2個にしたことによりパワーに余裕ができたので、大径タイヤ方式とオーバードライブ方式の2通りの方式をテストしてみることにしました。このうち、大径タイヤ方式はトレッドに比較してタイヤが大きすぎてまともにステアできないことが判明。それではということで、オーバードライブ機構をテスト。ギア比2:3のオーバードライブ機構を製作することに成功しました。また、ハイパワー化に伴って前輪のグリップ力が不足しため前輪がハイグリップタイプのタイヤに変更されています。
我ながらここまで来ることができたのかと感無量です。 legOS-0.1.7使用。Nogaさん、Louさんに感謝。 右回り(中心を右に見て回る) 9秒51 左回り(中心を左に見て回る) 9秒02 合計18秒53 |
|
|
|
裏側から見たところです。
内輪差をなるべく出さないように駆動輪と操舵輪の距離をできるだけ近づけるようにしています。
この辺の調整も難しいです。
このオーバードライブ機構の場合、ポッチ1つ分のブロックに穴1つという軸受けが必要になります。今回は8480に入っているパーツを使用しました。 |
|

|