それじゃあということで、発想を転換してセンサを取り払って制御することを止めたところ、それぞれのモータの 回転数が微妙に違うため予期せぬ動きをするようになり結構おもしろいことに気が付きました。 同じ場所でくねくねしていただけのロボットが突然歩き出したりして、そうかと思うと突然方向転換したり。 見ていて飽きません。当初の計画通りではないのですが、こういうのもありかなと思い公開することにしました。
4足歩行ロボット Qualk (QUadruped wALKer) |
|
|
|
|
|
|
|
|
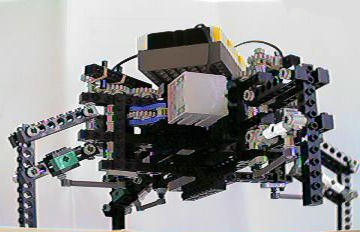
4足歩行ロボット「 Qualk(クウォーク)」です。
2足歩行ロボットを作った後に4足歩行も作ってみたくなって製作した作品です。
もともとはRCXを2台搭載してすべての脚を独立コントロールする計画だったのですが、試作した結果
RCX2台分の重量に耐えられなかったのと、デザイン的によくないという理由からRCXは1台とする方式に変更しました。
この変更により出力ポートが3ポートしか制御できなくなってしまったためすべての脚を完全に独立して制御することが
できなくなってしまいました。センサを付けて対角脚の同期をとればなんとか進むのですが4足がちゃんと同期していないと
思うようには歩きません。4足歩行は結構奥が深いです。 それじゃあということで、発想を転換してセンサを取り払って制御することを止めたところ、それぞれのモータの 回転数が微妙に違うため予期せぬ動きをするようになり結構おもしろいことに気が付きました。 同じ場所でくねくねしていただけのロボットが突然歩き出したりして、そうかと思うと突然方向転換したり。 見ていて飽きません。当初の計画通りではないのですが、こういうのもありかなと思い公開することにしました。 |
|
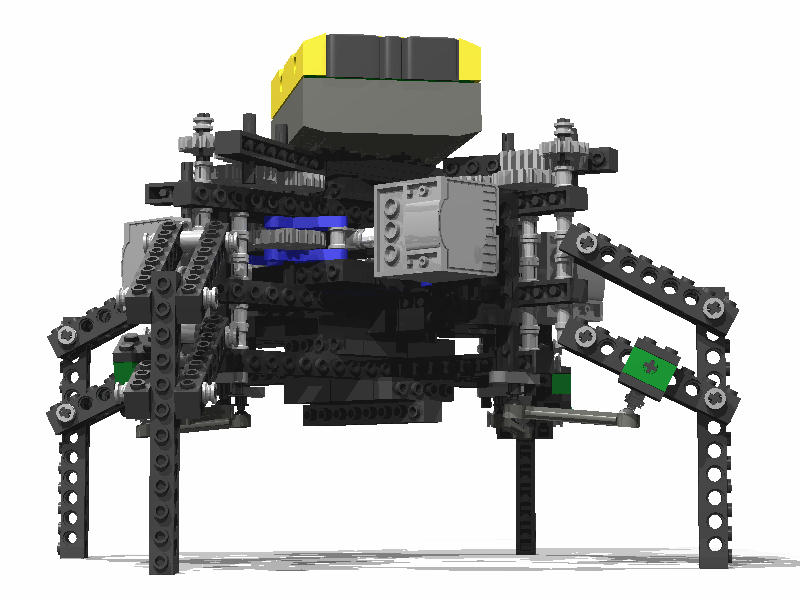
Qualkの特徴は、脚に平行4節機構を採用することによって低重心化を実現したことと、4つのモータと駆動部を
コンパクトにまとめて軽量化したことです。
RCXとモータ4つだけでもかなりの重量になるので、できる限りコンパクトな構成を模索しました。
このフレームとモータ配置に決定するまでに何度も試作を繰り返しましたが、なんとか納得できるレベルのものが
できました。4本の脚すべてが2自由度を持っていて独立したモータで駆動されます。(脚の機構部はJinSatoさん作のMTR-033を参考にさせて頂きました)さすがに8個もモータを持っていないのでメカ的に円軌道を描く機構を考えて1脚につき1つのモータで駆動しています、4つのモータの回転方向と
脚の接地タイミングの組み合わせによって前後進、横行、旋回などの動作が可能です。
写真だけでは歩行の様子が想像できないかもしれません。ぜひ動画をご覧ください。 |

|
|
今回も動画を用意しました。ただしこのロボットは気まぐれなので、いつも動画のような動きをするという訳ではありません。
その場でくねくねしているだけという時もあります。
(RealPlayer G2フォーマット) 前進(センサにて右前脚と左後脚を同期)qualk01.ram 20秒 113KB 左旋回(センサレス)qualk02.ram 34秒 194KB RealPlayer G2(フリーウェア)のダウンロードはこちらから。 |
|
|
|
|