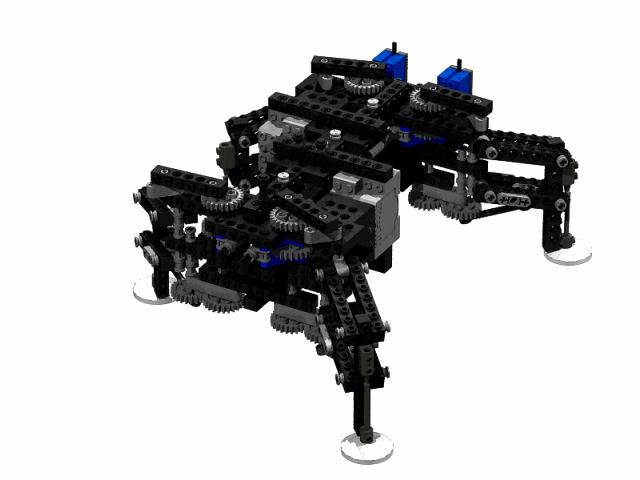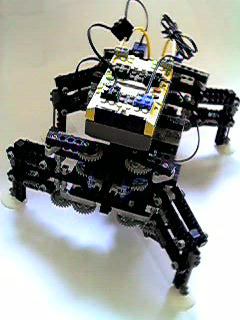
脚機構にはQualkの改良版を使用しており、右前脚と右後脚を 、左前脚と左後脚をそれぞれメカ的に同期させ右左独立のモータで 駆動しています。左右モータの回転は必ずしも同じではないので アングルセンサを2つ用いて右脚、左脚の同期を電気的に制御しています。
モータを2つに減らしたことによって歩行自由度は減りましたが、RCX1台で 制御が可能となり安定した歩行が可能になりました。また、プログラムで左右脚同期の位相を 90度進めたり、遅らせたりすることによって左右に方向転換することが可能です。
動物の4足歩行には、大きく分けて
A)馬のようにボデーの下に上下方向のリンク機構を構成するタイプ
B)トカゲのようにボデーの左右に横方向のリンク機構を構成するタイプ
の2種類があると考えました。
MINDSTORMSの4足歩行ロボットの多くはAのタイプで実現されています。
そこでBのタイプのロボットを作ってみようとQualkシリーズを作ったのですが、 構造上、RCXを搭載して歩行するためには脚にかなりの負担がかかることが判りました。 あきらかにBのデザインはAのデザインに比較して歩行において不利です。 よくよく考えてみるとBの脚デザインを採用している生物は、トカゲのように 小型のものがほとんどで(大型のワニは自重を脚だけでは支えきれないため腹部をこすりながら 移動しています)、象や馬といった大型の生物のほとんどは体重を支えるために Aのデザインを採用しています。
では、なぜ脚に負担のかかるBのデザインをあえて採用する生物が存在するのか? その理由をいくつか考えてみました。
1)低重心化が可能(岩や木の隙間に入ることができ、転倒しにくい)
2)壁に張りつく際に重心を壁に近づけることができて有利(ヤモリなど)
3)太陽光に当たる面積を大きくできる(変温動物にとって体温上昇時間は生死に関わる)
恒温動物にBのデザインのものが見あたらないことから私は3)が最も大きな理由なので はないかと考えましたが、本当のところはどうなのでしょうか? こんなMINDSTORMSの楽しみ方も楽しいです。